Os presento la primera parte de este artículo donde veremos una combinación entre la inteligencia artificial y drones, la cual espero os resulte tan instructiva y divertida como me ha resultado a mí .
Antes que nada, una pregunta: ¿por qué aplicar la combinación IA/hardware con drones? En realidad, lo que vamos a ver lo podríamos aplicar a todo tipo de dispositivos, pero luego de probar varios tipos de dispositivos me ha quedado claro que una de las opciones más divertidas son los drones. No digo que sean los únicos dispositivos ni que todos debéis considerar a los drones la mejor opción, recordad aquello de para gustos los colores…, pero en mi caso personal he probado coches, tanques, brazos robóticos y drones, y estos últimos son los que me han devuelto más horas de diversión y aplicación.
El dron
Tenemos muchísimas opciones en el mercado en materia de drones, y luego de una larga comparación y tiempo invertido, he llegado a la conclusión que los puntos importantes que harán que elijamos un dron u otro son los que enumero a continuación. Cada lector podrá quitar, agregar o cambiar el orden de esta lista según sus propios criterios, objetivos y necesidades.
Antes que daros esos criterios, quiero comentaros cuales eran los objetivos que perseguía cuando me propuse realizar este proyecto:
a) Comprobar la dificultad de aplicar Inteligencia Artificial en un dron, principalmente en materia de gestión de imagen y gestión del vuelo del dron.
b) Algo no muy complicado, se trata de los primeros pasos.
c) No es necesaria gran autonomía (batería), distancia de vuelo o capacidad de carga.
d) No es necesaria una cámara de súper calidad, necesitamos la suficiente para trabajar con la imagen desde un punto de vista de IA.
e) No queremos realizar una gran inversión.
El marcar de forma previa esos objetivos y dando un vistazo previo muy rápido a lo que hay en el mercado, nos permitirá marcar mejor las características que debemos tener en cuenta al momento de elegir el dron (la lista y su orden varía según tus objetivos):
Debe ser “programable”. Es decir que debe permitir la gestión/control del dron mediante código, y obviamente cuanto más popular sea el código permitido mejor (me refiero a que mejor si puedo programar en C o Python que en otro lenguaje propietario o similar).
Debe incorporar sistema de visión/cámara (integrada, acoplada, etc.).
Debe permitir el vuelo en interiores y exteriores.
La autonomía de la batería debe ser la suficiente para realizar pruebas, al menos 8 a 10 minutos.
Debe tener un sistema de comunicación aceptable y que permita cierta distancia con el control principal. Como dije antes, no necesito operar el dron a 2 kilómetros de distancia, pero sería frustrante perder la señal cuando se aleja más de 3 metros. Digamos que siga recibiendo señal a los 20 metros será aceptable.
No quiero gastar más de 120€ (julio 2023 – España).
A partir de aquí ya tengo mi lista de requerimientos, limitaciones o “aceptables” y si haces un estudio de mercado encontrarás que no hay tantas opciones posibles. Por supuesto que tienes drones que vuelan a 15 kilómetros de distancia y son programables, pero no los conseguirás por 120€… y así encontrarás que muchos cumplen muchas de las limitaciones, pero estoy buscando solo aquellos que cumplen todas.
Daros la lista completa de las opciones resultantes creo que tendría poca validez dada la velocidad a la que avanza el mercado, por lo que me voy a centrar en 2 resultados: DJI Tello y DJI Tello EDU
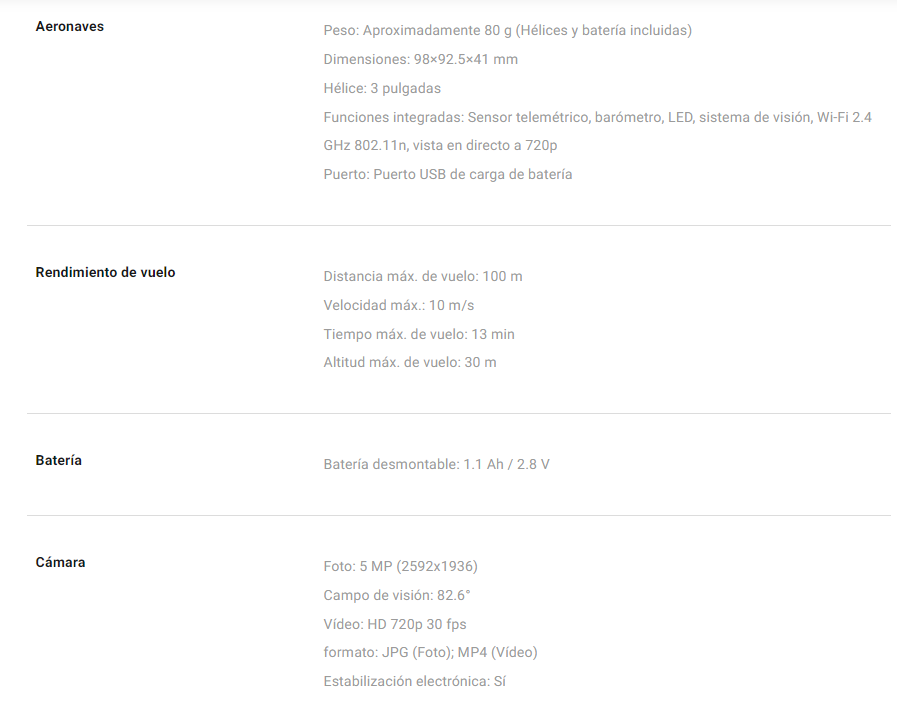

La diferencia entre Tello y Tello EDU es que EDU soporta las mismas funcionalidades que el estándar, y agrega el reconocimiento de mision pads (accesorios que compras por separado, parecidos a una lámina, que pones en el suelo para que el dron los reconozca automáticamente y ejecute misiones) y swarm flying (vuelo de múltiples Tello’s a la vez). En mi caso el Tello estándar era suficiente, por lo que fue el modelo que compré y además es más económico que la versión EDU.
La preparación del entorno de trabajo
Elegir un fabricante como DJI tiene la ventaja de que hay mucho material de apoyo para programar el dron y eso no deja de ser un punto importarte.
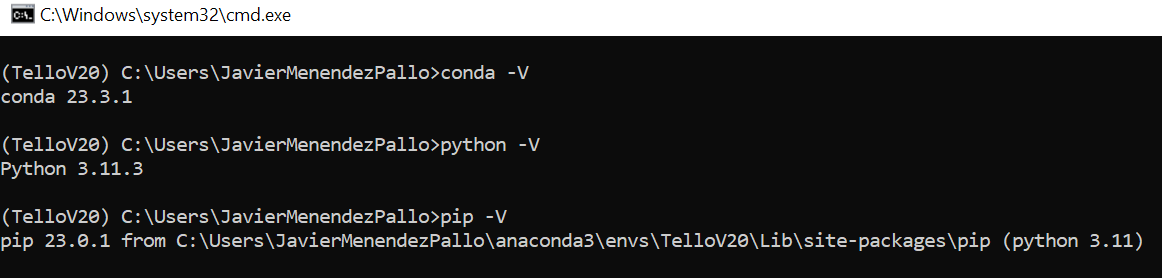
Con respecto al entorno de trabajo elegí trabajar con Python, por lo que te recomiendo tener un entorno virtual configurado con exactamente las mismas versiones de las distintas herramientas que te detallo a continuación:
Python 3.11.3.
Anaconda 2.4.0 (conda 23.3.1).
PIP: 23.0.1.
Con respecto al editor, utiliza el que te plazca. En mi caso utilizo Visual Studio Code o PyCharm indistintamente.
En cuanto el dron se inicia por primera vez y a través de la aplicación móvil oficial, deberás configurar una red wifi con la que se comunicará tu dispositivo con ese dron. Cuando trabajes desde el PC puedes conectar con el dron de dos formas dependiendo de las características de tu hardware:
Si tienes red LAN y wifi lo ideal es que la conexión estándar sea la de cable (LAN) y dejes la wifi disponible para comunicación con el dron al mismo tiempo (habrá momentos en los que estarás conectado a ambas redes).
Si no tienes LAN pero si wifi, lo ideal es que configures tu adaptador con 2 IP’s. Una IP con la configuración de tu red habitual, y una segunda IP configurada según las características de tu red privada con el dron. Tienes varios artículos en la web sobre como configurar 2 ip’s en el mismo adaptador.
Si tienes LAN pero no tienes wifi, no podrás comunicar con el dron… consejo: hazte con un USB de Wifi (tienes cientos en el mercado).
Como último punto también te detallo algunos paquetes (packages) que deberás tener instalados en tu entorno:
- Package para la comunicación con el dron: te recomiendo que te instales el helper de Python que recomienda el propio fabricante y que encontrarás documentado en https://djitellopy.readthedocs.io/en/latest/tello/. También puedes descargarte las fuentes de este helper desde https://github.com/damiafuentes/DJITelloPy. Si quieres instalártelo directamente puedes hacerlo con “pip install djitellopy” desde una ventana de comandos, o si prefieres tener el fuente a la vez de instalar el paquete lo haces con:
git clone https://github.com/damiafuentes/DJITelloPy.git
cd DJITelloPy
pip install - .
También puedes instalarlo con los propios gestores de paquetes de PyCharm o Visual Studio, mientras lo hagas en el environment de trabajo será indistinto.
El uso de este helper no es obligatorio, simplifica bastante el trabajo es verdad, pero podrías interactuar desde código con el dron SIN utilizar el helper sino enviando determinados comandos a un puerto específico donde el dron estará “esperando” por esos comandos. Este artículo se basa en el uso del mencionado helper, pero si no lo quieres utilizar y quieres la comunicación directa, mi colega Bruno Capuano tiene una excelente serie de artículos que te explican paso a paso cómo hacerlo. Los encontrarás en su blog, en: https://elbruno.com/2020/02/03/coding4fun-how-to-control-your-drone-with-20-lines-of-code-1-n/
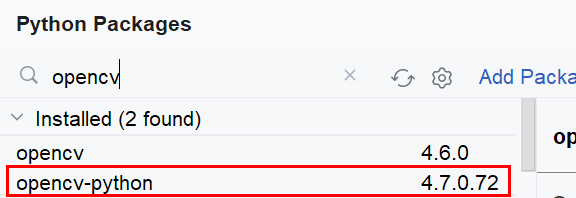 Otro paquete Python que vamos a
necesitar es OpenCV y lo utilizaremos inicialmente para la gestión
de la imagen que proviene del dron, aunque haremos cosas mucho más
interesantes más adelante. En mi caso instalé la versión 4.7 de
opencv-python y es la que necesitarás.
Otro paquete Python que vamos a
necesitar es OpenCV y lo utilizaremos inicialmente para la gestión
de la imagen que proviene del dron, aunque haremos cosas mucho más
interesantes más adelante. En mi caso instalé la versión 4.7 de
opencv-python y es la que necesitarás.En mi caso utilizo PyGame como paquete Python para la gestión del interfaz/pantalla. Nuevamente aquí tenemos gran cantidad de opciones y si eres asiduo programador Python puedes preferir otro, pero este es el que tenía a mano y cumple su función por lo que PyGame 2.4.0 también forma parte del entorno.
Por último, también utilizaremos NumPy. NumPy es una biblioteca, que agrega soporte para arreglos y matrices grandes y multidimensionales, junto con una gran colección de funciones matemáticas de alto nivel para operar en estos arreglos. Como una imagen es en realidad un array, NumPy nos ayudará con algunas de las operaciones que vamos a realizar sobre. La versión de NumPy instalada es la 1.24.3.
Código: el detalle de los primeros pasos.
Cuando tengas el entorno preparado ya podemos comenzar a trabajar con nuestro dron. En este epígrafe iré desgranando las distintas secciones del código, pero no es necesario que vayas copiando y pegando de a pedazos… te comparto todo el código al final .
Como primera entrega de este artículo dividido en dos partes, te comento que esta primera parte cubre los aspectos básicos para la comunicación con el dron utilizando el helper DJITelloPy. También iremos varios pasos más allá y veremos cómo:
Gestionar el movimiento del dron desde nuestra aplicación.
Mostrar en nuestra aplicación el video que está captando nuestro dron, en tiempo real.
A modo de postre: aplicar una sencilla Inteligencia Artificial sobre la imagen (reconocer caras).
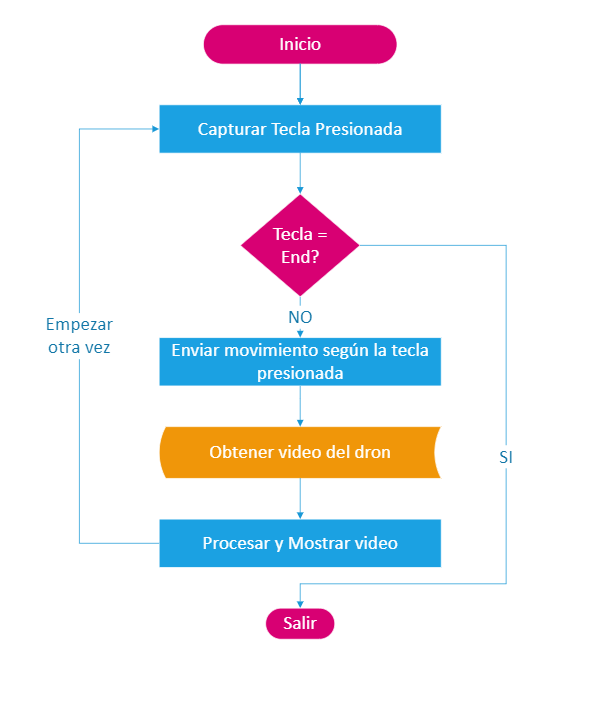
A vista de pájaro nuestro código funcionará de la siguiente forma:
Imports e inicializaciones
 Esta sección no tiene mucho misterio,
simplemente enumeraremos las distintas bibliotecas que vamos a utilizar
para que Python genere los objetos correspondientes.
Esta sección no tiene mucho misterio,
simplemente enumeraremos las distintas bibliotecas que vamos a utilizar
para que Python genere los objetos correspondientes.
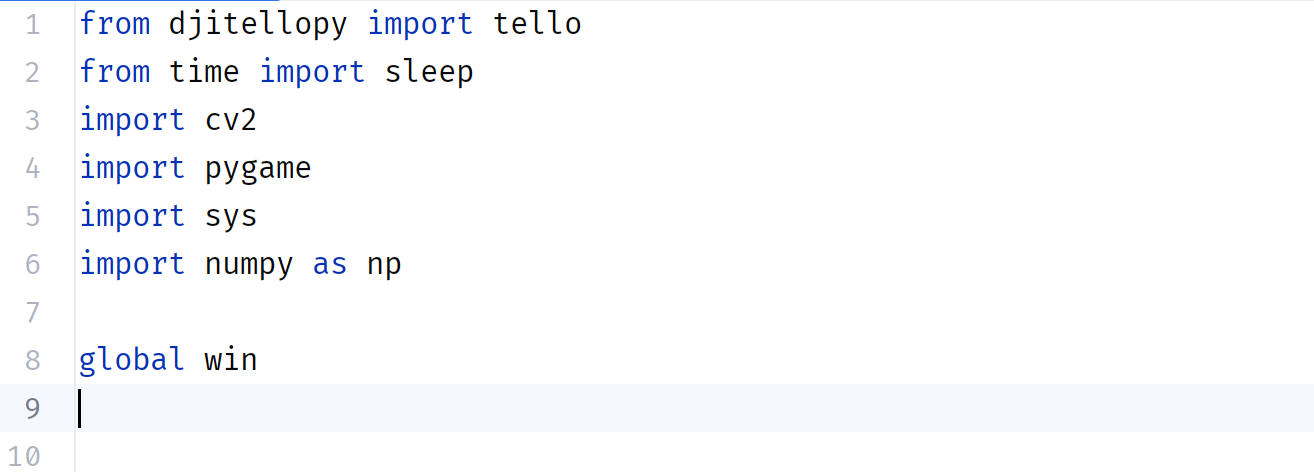
En la línea 1 tienes la forma de hacer referencia al helper para la comunicación con el dron, y mediante este paquete es que realizaremos toda la comunicación: enviaremos comandos, recibiremos respuestas, obtendremos parámetros, etc.
La línea 2 a la 6 son simples imports del resto de paquetes. Utilizaremos cv2 para la gestión del video, PyGame para la gestión de la interfaz y NumPy nos ayudará con el tratamiento del vídeo.
La variable ‘win’ de la línea 8 será nuestro objeto que representa la interfaz, es decir, en las siguientes líneas verás como todo lo que hacemos en pantalla lo hacemos a través de esa variable, que es en realidad un instanciado de PyGame.
Capturar tecla presionada
 La primera función que definiremos es la
captura y procesa la tecla presionada en nuestra aplicación, para
“convertirla” a una orden específica para el dron.
La primera función que definiremos es la
captura y procesa la tecla presionada en nuestra aplicación, para
“convertirla” a una orden específica para el dron.
He de comentar que la biblioteca tiene varias funciones para procesar el movimiento, pero la más rápida es el comando que realmente entiende el dron. Lo que nuestro dron realmente espera cuando le enviamos la orden de movimiento es:
Movimiento hacia derecha o izquierda que llamamos ’lr’ (positivo para mover hacia la izquierda o negativo para mover hacia la derecha)
Movimiento hacia adelante o atrás que llamamos “fb” (positivo para mover hacia adelante o negativo para mover hacia atrás)
Movimiento hacia arriba o abajo que llamamos “ud” (positivo para subir o negativo para bajar)
Movimiento de rotación en un sentido u otro que llamamos “yv” (positivo para rotación en sentido horario o negativo para sentido antihorario)
Y para cada uno de esos parámetros espera un valor, que yo he definido como “speed” en la línea 15 y es lo que me he definido marco como unidades de movimiento, que te adelanto que son unos 10 centímetros. Lo ideal es que hagas tus propias pruebas para encontrar el valor de “speed” ideal, haciendo que tu dron se mueva menos con un valor más bajo, o se mueva más con un valor más alto. Si lo anterior no te queda claro veamos un ejemplo:
Si enviamos al dron la orden moverse(50,0,0,0) en realidad lo que estás diciendo es que quieres que se mueva 50 puntos a la izquierda de la posición actual (si hubiésemos querido que fuese a la derecha deberíamos haber indicado ‘-50’), 0 puntos hacia adelante/atrás, 0 puntos hacia arriba/abajo y 0 puntos de rotación. Si enviamos la orden moverse(-20,100,-35,90) le estamos pidiendo que se mueva a la derecha 20 puntos, al mismo tiempo que va para adelante 100 puntos, al mismo tiempo que baja 35 puntos, y al mismo tiempo que rota en sentido horario 90 puntos.
Recuerda que los puntos son una medida interna, que podríamos traducir a que 50 puntos son aproximadamente 10 centímetros.
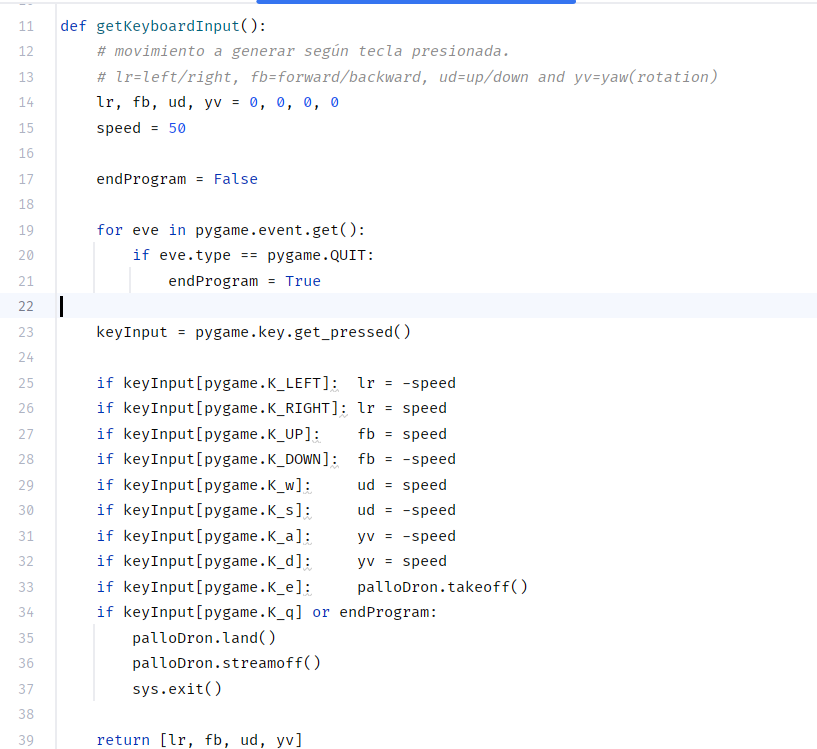
El código de esta función en realidad no tiene mucho misterio:
En la línea 23 capturamos la tecla que se ha presionado en teclado.
Asignamos un valor positivo o negativo a los 4 parámetros lr, fb, ud, yv siempre en unidades de la variable speed (inicializada en 50).
Devolvemos array con los 4 parámetros de movimiento.
Como puedes ver en el código el movimiento que yo he elegido es que utilizaré los cursores para mover el dron a izquierda, derecha delante o atrás, y utilizaré las teclas w, s, a, d para subir, bajar, rotar horario, rotar antihorario respectivamente. Hay dos teclas más que requieren un tratamiento especial: necesitamos una para despegar (tecla ’e’) y una para aterrizar (tecla ‘q’).
Como ves, esto de separar el procesamiento de las teclas ’e’ y ‘q’ se debe a que hay que enviar comandos especiales al dron para realizar esas acciones. El acto de despegar no es simplemente enviar el dron hacia arriba, es un proceso separado que tiene un comando separado y por eso lo de asignarle una tecla exclusiva. Lo mismo pasa con la tecla ‘q’ que como sabes, solemos utilizar para terminar un programa Python. Al presionarse esa tecla y antes de matar el programa debemos aterrizar el dron y cerrar la conexión, y por ello la tratamos de forma separada.
Inicializar el interfaz
 Otra función que he querido definir, y más
que nada para tener un código final más limpio y legible, es la de
inicializar todos los temas del interfaz de nuestra aplicación.
Otra función que he querido definir, y más
que nada para tener un código final más limpio y legible, es la de
inicializar todos los temas del interfaz de nuestra aplicación.
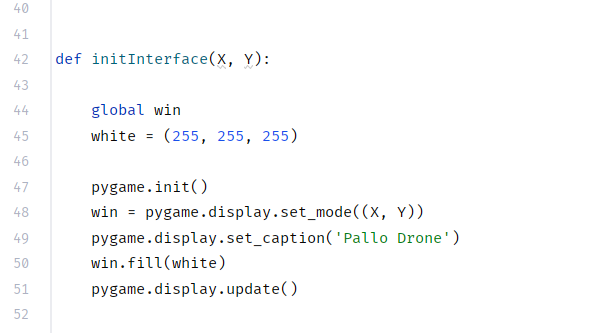
Esta función recibe como parámetros el ancho y alto de la ventana que quieres crear (línea 42) y pinta una ventana con esas dimensiones utilizando PyGame (línea 48). También le pone un título y pone color blanco como fondo de esa ventana en las líneas 49 y 50 respectivamente.
Cualquier referencia a esta ventana nos quedará almacenada en esa variable global que habíamos definido anteriormente llamada “win”.
Mostrar el vídeo proveniente del dron
 Una última función que necesitamos es
aquella que se encargará de mostrar el vídeo que nos está enviando el
dron. Esta función recibe como parámetro un frame de ese video (‘img’)
para luego procesarlo y mostrarlo.
Una última función que necesitamos es
aquella que se encargará de mostrar el vídeo que nos está enviando el
dron. Esta función recibe como parámetro un frame de ese video (‘img’)
para luego procesarlo y mostrarlo.
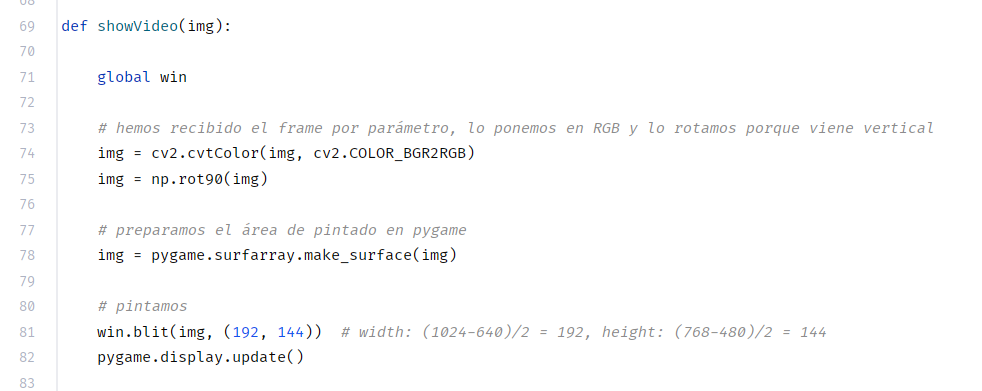
Importante la función de la línea 74, encargada de convertir del formato BGR en el que viene el vídeo hacia formato RGB que es el que acostumbramos a usar. Te invito a que la comentes y veas que pasa . Por cierto, la imagen viene rotada de origen, por lo que la rotaremos antes de mostrarla (línea 75).
El resto de las instrucciones no tienen mucha ciencia, aunque tal vez vale comentar esos valores de la línea 81: como en la mayoría de las pruebas que he realizado utilizo una ventana para esta aplicación que mide 1024 x 768 píxeles, lo que hacemos en esta línea es centrar el frame de video dentro de nuestra ventana, tanto horizontal como verticalmente. Dado que el frame de video es de 640 x 480 el calculo para centrarlo es fácil y es lo que ves en esa línea. En realidad, esto no es lo ideal, porque solo va a centrar el frame de forma correcta cuando la ventana y el frame tengan los valores mencionados. Si quieres hacer que la función sea válida para todas las resoluciones y tamaños de frame posibles deberíamos obtener los valores de largo y alto, tanto para la ventana como para el frame, y trabajar en base a eso.
El programa principal
Llegamos a la última parte de nuestro código y como verás hace mucha referencia al diagrama de flujo que veíamos al principio.
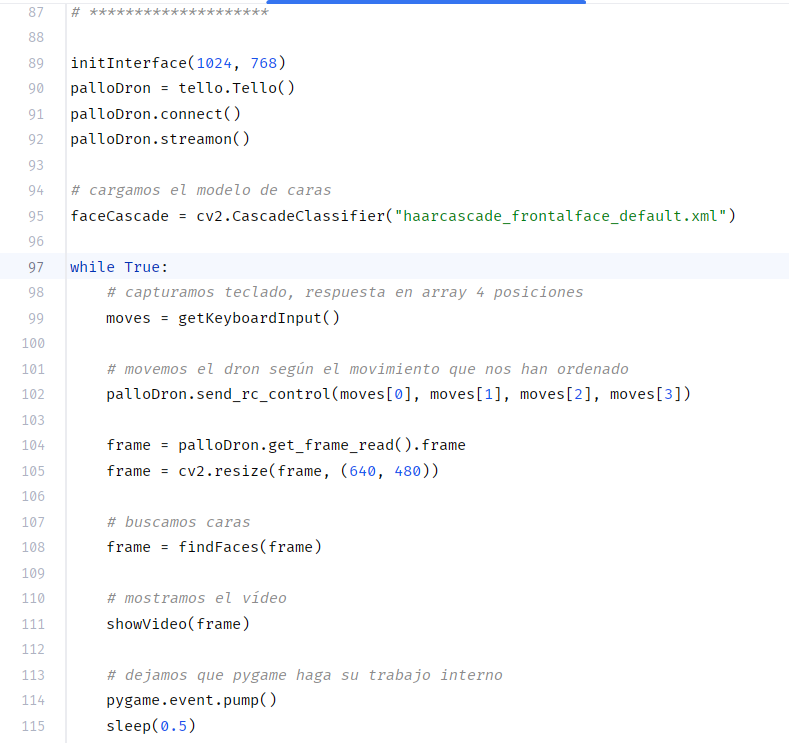 Como primer cosas inicializaremos el
interfaz en la línea 89 llamando a nuestra función creada anteriormente
y pintando una ventana al usuario del 1024 x 768 píxeles.
Como primer cosas inicializaremos el
interfaz en la línea 89 llamando a nuestra función creada anteriormente
y pintando una ventana al usuario del 1024 x 768 píxeles.
Las 3 líneas siguientes son casi obligatorias para el uso del dron:
La línea 90 crea nuestro objeto dron
La línea 91 realiza la conexión con el dron. Aquí es donde utilizarás lo de la wifi que comenté al principio y obviamente el dron tiene que estar encendido, conectado a la red wifi y tu PC también tiene que estar conectado a esa red.
La línea 92 es el comando que ordena al dron iniciar la transmisión de video de todo lo que esté captando su cámara.
La línea 95 no te lo voy a explicar ahora, lo dejamos para la segunda parte, pero es importante que si la pones la comentes, porque si no dará un error que no te dejará seguir.
Luego de conectar con el dron e iniciar la transmisión de vídeo comenzamos en un bucle infinito a:
Capturar la tecla que se presiona en el teclado (línea 99).
Línea 100: enviamos al dron la orden de movimiento según la tecla presionada, y si no es una de nuestras teclas se enviará 0,0,0,0 o lo que es lo mismo: “no te muevas de donde estás”.
Las líneas 104 y 105 leen un frame de video proveniente del dron y lo reducen un poco. Ten en cuenta que cuanto mayor sea la resolución con la que quieras trabajar mayor recursos y capacidad de proceso necesitará tu programa.
La línea 108 es el postre que te comentaba antes, pero te lo explicaré en la segunda parte. Si comentaste la línea 95 debes comentar esta también, pero si quieres ver lo que hace deja ambas líneas sin comentar y descarga un archivo llamado ‘haarcascade_frontalface_default.xml’ desde el GitHub de OpenCV en https://github.com/opencv/opencv/tree/3.4/data/haarcascades. Ese fichero xml y tu aplicación Python deben estar en el mismo directorio.
Nuestra línea 111 es la encargada de llamar a nuestra función para pintar el frame que hemos recibido desde el dron. Observa que le pasamos el frame como parámetro, pero ten en cuenta que ese frame no es el real que se recibió desde el dron, sino que lo hemos modificado en la línea 104 y 105 (y 108 si no la has comentado ).
Por último, llamamos a una función de PyGame que ordena que haga su trabajo: ‘pump’. No te hagas problema por la función en sí, pero ten en cuenta que es aquí cuando le dices a PyGame que “si tienes algo pendiente de hacer hazlo ahora” (pintar pantalla, procesar una tecla, etc.).
Para terminar
Tal como te prometí, no era necesario que fueses copiando y pegando cada trozo de código, porque aquí lo tienes completo y tal como lo hemos explicado antes:
https://1drv.ms/f/s!ApIsxewvm-JyjB2ufjdPxmdSAJ4B
Espero que este artículo te haya resultado interesante, y si te decides por probar el código espero que vaya todo bien y tengas un buen rato de diversión. Ante cualquier problema puedes contactar conmigo (datos de contacto en mi perfil de la revista).
Dejo a tu criterio todas las mejoras que este código podría recibir y cuento contigo para la segunda parte, donde agregaremos funciones específicas de Inteligencia Artificial e intentaremos que nuestro dron vuele de forma automática. ¡¡te espero en la próxima!!!
¡Abrazo!
Javier Menendez Pallo
IA MVP
De la revista Número 57 - Septiembre 2023
Edición número 57 de la revista CompartiMOSS.
Ver más artículos de esta revista →