Os presento la segunda y última parte de este artículo donde veíamos una combinación sencilla entre la inteligencia artificial y drones.
Esta parte será mucho más corta que la anterior, en realidad sólo vamos a agregar un par de funciones, las más dedicadas a la parte de la Inteligencia Artificial, por lo que vayamos a por ello.
Recapitulando
El código que ya os había compartido sigue siendo válido, y solo tenemos pendiente modificar una función y agregar otra para dar este articulo por terminado.
Antes de entrar a fondo en el código faltante creo que sería bueno resumir lo que tenemos hasta ahora:
Ya tenemos la inicialización completa y hemos considerado todas las librerías que necesitamos.
Tenemos el control manual del dron, lo podemos hacer despegar, moverse en cualquier sentido y aterrizar.
Recibimos el vídeo que proviene de la cámara del Dron y lo mostramos en pantalla.
Y nos faltaría:
Debemos “procesar” el video que viene del Dron, para identificar los objetos que está captando la cámara y discernir entre esos objetos. En esta parte es donde podemos hacer uso de toda nuestra imaginación y codificar lo necesario para que esa identificación sea de un objeto en particular, de varios objetos, de una persona, personas, etc. En nuestro caso, por tratarse de una introducción básica haremos un reconocimiento de personas, específicamente caras y debes tener en cuenta que vamos a reconocer todas las caras que esté captando la cámara en ese momento, quedándonos con la de mayor tamaño y suponiendo que esa cara de mayor tamaño pertenece a la persona que está más cerca.
Acto seguido deberemos mover el dron en relación con la cara que hemos identificado, con el objetivo de que siempre esté “mirando” la cara y se mueva según la persona se mueve. En este punto debes tener en cuenta que, aunque podemos mover el dron como queramos (arriba/abajo, delante/atrás, izquierda/derecha y rotación horaria/antihoraria) no haremos todos los movimientos para no complicar el código. Ya verás que si quieres realizar todos los posibles movimientos debes modificar el código mínimamente, pero para nuestro ejemplo valdrá con solamente manejar 2 movimientos: rotación y avance.
Dicho esto, vamos a por ello!
La detección de las caras
Modifica el código que teníamos escrito para la función findFaces y déjalo tal como aparece en la siguiente imagen, y recuerda que al final del artículo te compartiré todo el código para que simplemente tengas que ejecutarlo, no siendo necesario que escribas cada línea.
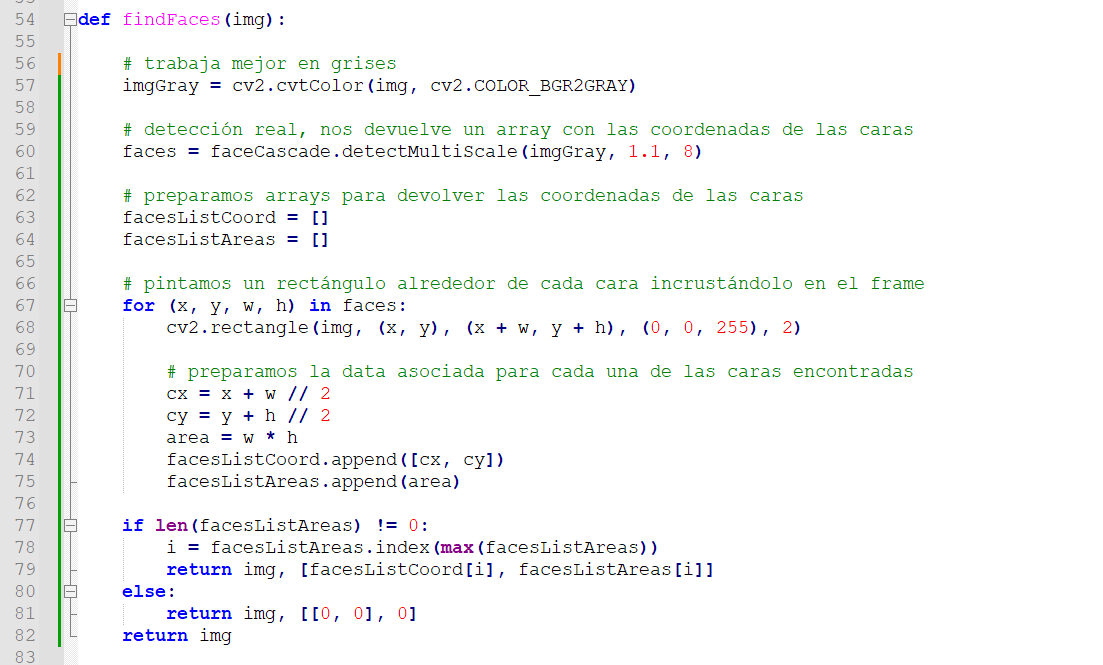
Como puedes ver hemos agregado cosas a nuestra función que detecta las caras.
En primer lugar, recuerda que para que la línea 60 funcione, debes haber cargado el fichero ‘haarcascade_frontalface_default.xml’, tal como te comentaba en la parte 1 de este artículo.
La modificación principal se encuentra en la instrucción for de la línea 67 y como puedes ver lo que básicamente hace es almacenar en 2 arrays todas las posiciones donde se ha encontrado una cara. Es decir, antes solo las detectábamos y pintábamos las caras y ahora seguimos haciéndolo, pero nos guardamos su posición. Ya verás para que.
Finalmente, las instrucciones la línea 77 en adelante retornan la imagen que retornaba nuestra función original MÁS una matriz formada por los dos arrays, uno con las coordenadas de las caras encontradas y el otro con las áreas de la imagen.
El seguimiento
En esta parte vamos a escribir la parte que nos falta: la función que realmente ordena al dron realizar el movimiento respectivo para que haga el seguimiento de la persona.
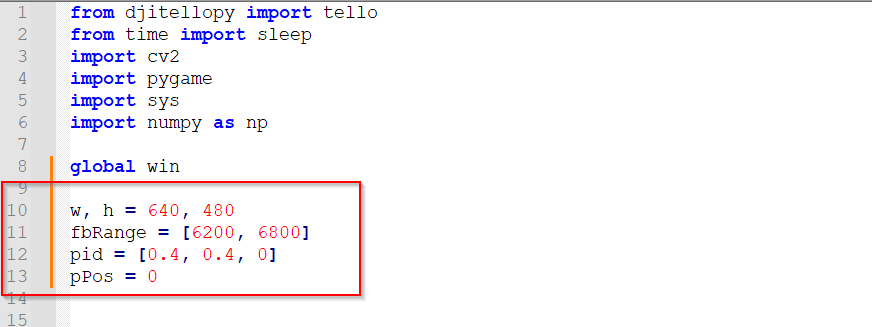
Antes que nada, agreguemos unas variables que utilizaremos de forma global, en mi caso las he agregado al principio:
Acto seguido debemos agregar nuestra función de seguimiento, y aquí la tienes:
Tampoco esta función es muy compleja como puedes ver, pero vamos a analizarla de todas formas.
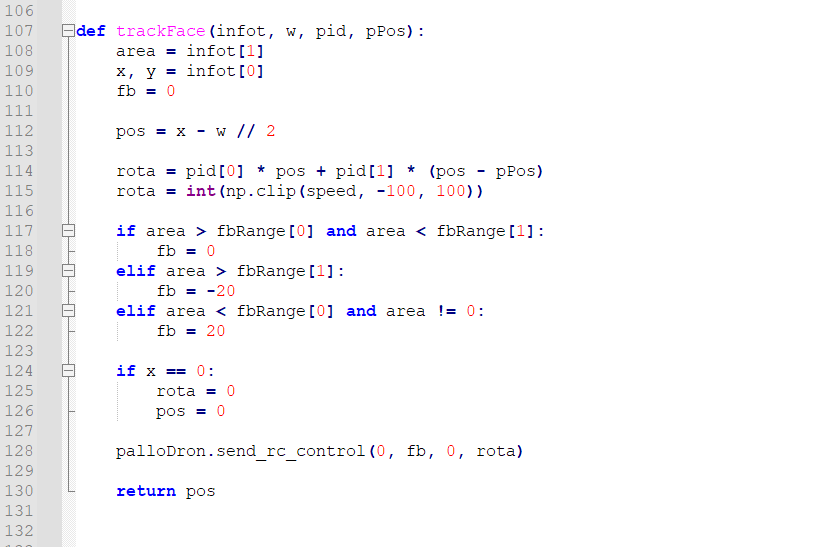 Recibe como parámetros los arrays de
posición, el ancho de imagen con el que está trabajando, un corrector de
error que hemos definido como variable (el valor de estas variables
refleja los valores que resultaban mejor para mi caso, puedes variarlas
en tu caso) y la posición anterior, por aquello de que el movimiento que
se realice se haga partiendo del movimiento que hicimos en la llamada
anterior a esta misma función.
Recibe como parámetros los arrays de
posición, el ancho de imagen con el que está trabajando, un corrector de
error que hemos definido como variable (el valor de estas variables
refleja los valores que resultaban mejor para mi caso, puedes variarlas
en tu caso) y la posición anterior, por aquello de que el movimiento que
se realice se haga partiendo del movimiento que hicimos en la llamada
anterior a esta misma función.
En las líneas 114 y 115 estamos calculando la rotación que debemos tener en base al movimiento que ha tenido el usuario, o lo que es lo mismo: si la persona se ha movido a su derecha, el dron debe rotar hacia la izquierda, para seguir manteniendo la cara de la persona en el foco de la cámara (actúa como un espejo) y viceversa si se ha movido en la dirección contraria. El valor de pid actúa como un multiplicador de movimiento y aquí tendrás que hacer tus propias pruebas. Verás que, si aumentas los valores en los que hemos inicializado pid, el dron hace movimientos rotacionales mas bruscos, es decir, hace más rotación para enfocar al usuario y lo inverso si reduces el valor. Te recomiendo que pongas un valor cuyo resultado haga que el dron rote de forma suave, recuerda que esta función se ejecuta múltiples veces, una por cada frame que recibe, por lo que tienes tiempo para reposicionar el dron en cada pasada.
Los if y elif siguientes hacen lo mismo que para el caso de la rotación para esta vez actuando sobre el avance y retroceso y todo ello viene comandado por el tamaño de la cara que se ha detectado. Si la cara es más grande que el tamaño de la cara que tenemos en nuestra variable fbRange haremos que el dron retroceda (estamos muy cerca). Si la cara es más pequeña nos acercaremos…. Aquí tienes que jugar otra vez con los valores en los que se inicializa fbRange, ya que cuanto más pequeños sean más estarás arriesgando con el dron haciendo que se acerque más a la cara de la persona antes de quedarse flotando.
Para terminar
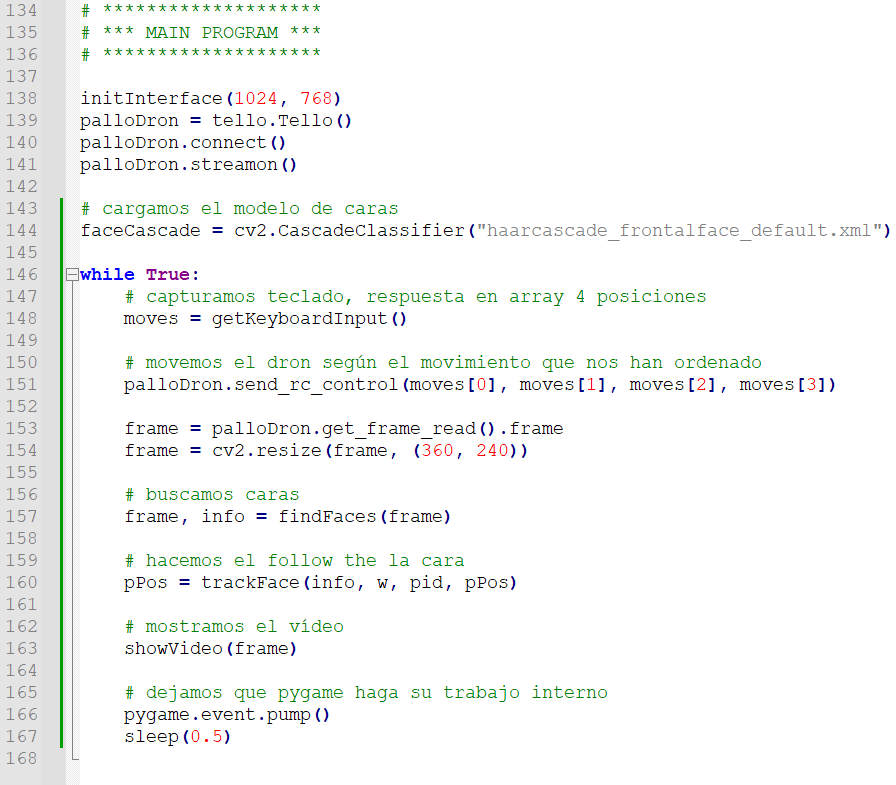
Ya tenemos todo el código que necesitamos, nos queda simplemente actualizar nuestro programa principal para llamar a las nuevas funciones y probar todo. Aquí la modificación:
Tal como te prometí, no era necesario que fueses copiando y pegando cada trozo de código, porque aquí lo tienes completo y tal como lo hemos explicado antes:
Espero que este artículo te haya resultado interesante, y si te decides por probar el código espero que vaya todo bien y tengas un buen rato de diversión. Ante cualquier problema puedes contactar conmigo (datos de contacto en mi perfil de la revista).
Dejo a tu criterio todas las mejoras que este código podría recibir y cuento contigo para que mes feedback y me cuentes que tal vuela tu dron de forma automática. ¡¡te espero en la próxima!!!
¡Abrazo!
Javier Menendez Pallo
IA MVP
De la revista Número 58 - Diciembre 2023
Edición número 58 de la revista CompartiMOSS.
Ver más artículos de esta revista →